


Elon Musk revealed his newest project, XMail, an e...
news-extra-space
 Li and his colleagues will also devise other robotics and machine-learning models to improve robot performance in other football-related activities. Furthermore, Li and colleagues will develop other frameworks and machine learning models to enhance the effectiveness of robots in soccer. Lee and his colleagues have tested their frameworks on a series of real-world tests using robots. Researchers have trained their quadruped robots to perform in football games for decades. As a result, the robots are more agile and are sure to handle more complex tasks, and enjoy playing football with humans. Furthermore, Pony.ai, the self-driving tech startup company stated that they are planning on producing robot trucks in mass along with Sany Heavy Industry.
All of these results have predecessors in the existing literature; the contribution of this paper is to establish them in a more straightforward, more generic context, with few changes in existing reinforcement learning frameworks.
Li and his colleagues will also devise other robotics and machine-learning models to improve robot performance in other football-related activities. Furthermore, Li and colleagues will develop other frameworks and machine learning models to enhance the effectiveness of robots in soccer. Lee and his colleagues have tested their frameworks on a series of real-world tests using robots. Researchers have trained their quadruped robots to perform in football games for decades. As a result, the robots are more agile and are sure to handle more complex tasks, and enjoy playing football with humans. Furthermore, Pony.ai, the self-driving tech startup company stated that they are planning on producing robot trucks in mass along with Sany Heavy Industry.
All of these results have predecessors in the existing literature; the contribution of this paper is to establish them in a more straightforward, more generic context, with few changes in existing reinforcement learning frameworks.
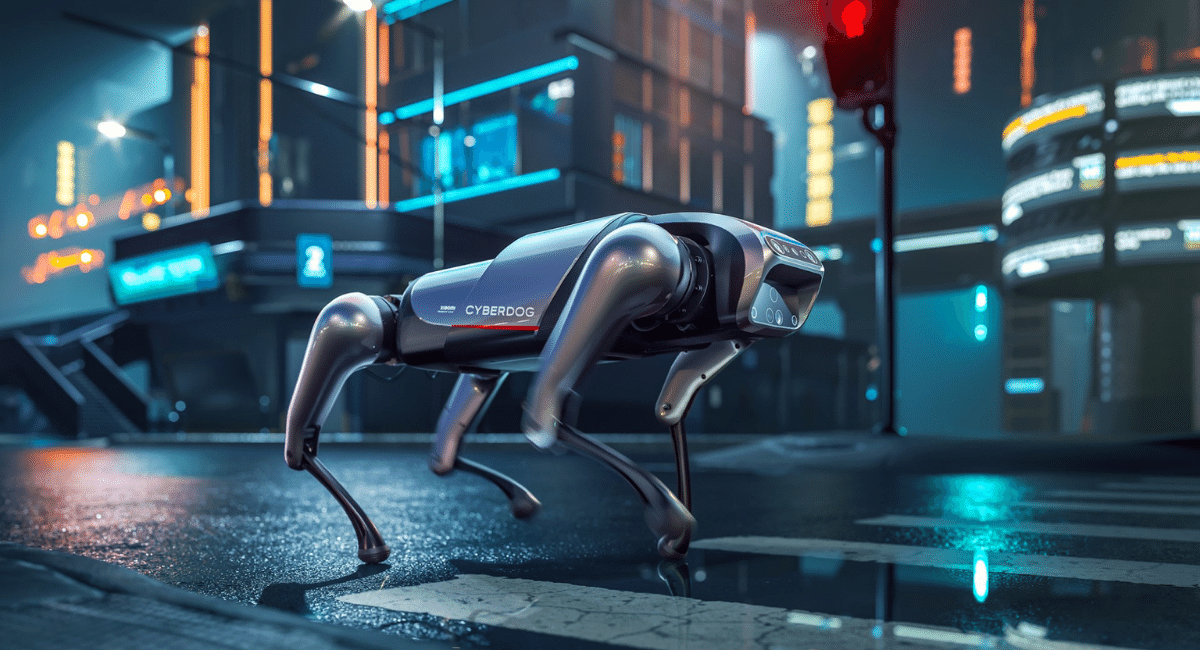
 They found it allows a Unitree A1 to throw a deformed football at arbitrary targets with high accuracy. In addition, they found that it allowed the quadruped robot to shoot a twisted soccer ball to random targets with high precision.
This issue was challenging, as Unitree A1 had to quickly sway the leg that was being kicked, gaining momentum without losing its stability. Motion Control allows the quadruped robot to track arbitrary paths of the toes of its kick foot. The movement-planning cover, and again, choose an optimal toe path for shooting the close-range football (as detected from an external digital camera) at a target position. Get complete knowledge about Ethics Researchers, claimed that Google’s LaMDA AI chatbot tool aspires to be a living being.
They found it allows a Unitree A1 to throw a deformed football at arbitrary targets with high accuracy. In addition, they found that it allowed the quadruped robot to shoot a twisted soccer ball to random targets with high precision.
This issue was challenging, as Unitree A1 had to quickly sway the leg that was being kicked, gaining momentum without losing its stability. Motion Control allows the quadruped robot to track arbitrary paths of the toes of its kick foot. The movement-planning cover, and again, choose an optimal toe path for shooting the close-range football (as detected from an external digital camera) at a target position. Get complete knowledge about Ethics Researchers, claimed that Google’s LaMDA AI chatbot tool aspires to be a living being.
 BeReal uses scarcity (limiting customers to a minimum number of submissions each day) and mystery (customers are unaware in advance of the timing when a notification is coming) to draw customers in. However, while BeReal is trying to clarify some of the disruptive cultures (and endless scrolling) developed around platforms such as Instagram, customers may still be annoyed and tied to their phones, waiting for each daily notification. Therefore, for longer-term viability, BeReal needs to consider what advertising or other corporate partnerships would look like on BeReal, and what impact those could have on a person's experience. Although, Google has brought a new Robot that takes orders by scraping the web.
BeReal uses scarcity (limiting customers to a minimum number of submissions each day) and mystery (customers are unaware in advance of the timing when a notification is coming) to draw customers in. However, while BeReal is trying to clarify some of the disruptive cultures (and endless scrolling) developed around platforms such as Instagram, customers may still be annoyed and tied to their phones, waiting for each daily notification. Therefore, for longer-term viability, BeReal needs to consider what advertising or other corporate partnerships would look like on BeReal, and what impact those could have on a person's experience. Although, Google has brought a new Robot that takes orders by scraping the web.
 Li et al., Hierarchical reinforcement studies precise football capture techniques using quadruple-limb robots. Applying hierarchical reinforcement learning to learn soccer-taking skills using Unitree A1 accurately was carried out by Yandong Ji et al.
Li et al., Hierarchical reinforcement studies precise football capture techniques using quadruple-limb robots. Applying hierarchical reinforcement learning to learn soccer-taking skills using Unitree A1 accurately was carried out by Yandong Ji et al.

Leave a Reply






Elon Musk revealed his newest project, XMail, an e...

Prepare to navigate your friends' Stories using a ...

Apple faces a challenge from the Cash program, the...

Remember how difficult it was to Shazam a catchy T...

Following the viral popularity of its AI selfies, ...
The days of awkward keyword searches and never-end...